Videos
Lab Demos
Demos, paper presentations, and experiment recordings from our research.
 3:12
3:12 Concrete Multi-Agent Path Planning Enabling Kinodynamically Aggressive Maneuvers
Mar 16 · 3:12
 2:59
2:59 ReCoDe: Reinforcement Learning-based Dynamic Constraint Design for Multi-Agent Coordination
Aug 2025 · 2:59
 2:47
2:47 D4orm: Multi-Robot Trajectories with Dynamics-aware Diffusion Denoised Deformations
Jul 2025 · 2:47
 4:19
4:19 CoViS-Net: A Cooperative Visual Spatial Foundation Model for Multi-Robot Applications
Oct 2024 · 4:19
 1:44
1:44 SO(2)-Equivariant Downwash Models for Close Proximity Flight
Dec 2023 · 1:44
 1:22
1:22 Modelling Aggregate Downwash Forces for Dense Multirotor Flight
Nov 2023 · 1:22
 1:54
1:54 Docking Multirotors in Close Proximity Using Learnt Downwash Models
Nov 2023 · 1:54
 2:27
2:27 See What the Robot Can't See: Learning Cooperative Perception for Visual Navigation
Jul 2023 · 2:27
 4:26
4:26 Heterogeneous Multi-Robot Reinforcement Learning
May 2023 · 4:26
 2:46
2:46 VMAS: A Vectorized Multi-Agent Simulator for Collective Robot Learning
Jul 2022 · 2:46
 3:51
3:51 Explanation-Aware Experience Replay in Rule-Dense Environments
Jun 2022 · 3:51
 2:35
2:35 A Framework for Real-World Multi-Robot Systems Running Decentralized GNN-Based Policies
Nov 2021 · 2:35
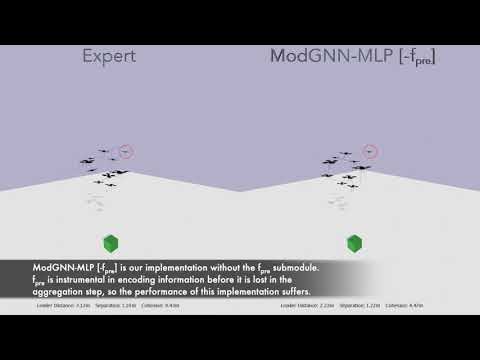 2:30
2:30 ModGNN: Expert Policy Approximation in Multi-Agent Systems with a Modular Graph Neural Network
Mar 2021 · 2:30
For more videos, visit our YouTube channel:
Prorok Lab on YouTube